Floating Compression
A term that is often used with respect to tensegrities is floating compression. This isn't floating in the sense of a log on a river, rather floating in the sense that the pressure elements can adjust relative to each other. In the case of the human body where bones could be considered the pressure elements, the bones have the ability to adjust at the joints even as the joint capsule envelope hold those bones in an articulating relationship. In the case of a balloon where the molecules of air are the pressure elements, the molecules move freely with respect to each other, constrained only by the rubber skin (the tension element) of the balloon itself.
In a tensegrity the tension elements form a tension network. The fact that the pressure elements can move relative to each other is what allows the tension network to distribute stress.
Tensegrities Have High Strength to Weight Ratios
An important quality of tensegrity structures is that their strength to weight ratio is high compared to non-tensegrity structures. One such example is the bicycle wheel, the old type, with metal spokes and rims.
Bicycle Wheel Tensegrities
In an old style bicycle wheel the rim and hub could be considered the pressure elements. The hub and rim are maintained in a fixed relationship while "floating" relative to each other. They are kept from directly contacting via the spokes which are the tension elements. Generally the spokes of a bicycle wheel are tightened so that the hub and rim are fixed in a relatively rigid relationship to each other. The results is a strong, but light, wheel.
When I was younger I frequently found myself riding over bumps, or getting my wheel stuck in sewer gratings so that I had plenty of opportunity to try trueing my wheels. With a bent rim, tightening or loosening spoke tension around any bends in the rim could be used to help pull the rim back into "true".
Turning a spoke one way could increase spoke tension pulling that part of the rim towards the side of the hub that the other end of the spoke in question is attached to. Reducing spoke tension could allow the rim to move in the opposite direction.
The interesting thing about adjusting tension, is that while turning the spoke key in one direction or the other, to tighten or loosen a spoke, I could feel the amount of tension that the spoke already had. If the spoke had a lot of tension the spoke key was harder to turn. If the spoke had only a little tension then the spoke key was relatively easier to turn.
Assuming a rim that wasn't bent, spoke tension in a wheel at rest would ideally be evenly distributed throughout all of the spokes. Each of the spokes would have the same amount of tension.
By strumming spokes, or by tentatively trying to tighten or loosen (just a little, like squeezing fruit at a super market) it could be possible to feel when the spokes all had approximately the same amount of tension. Or at the very least feel if any one spoke had too much or too little tension.
Note that proper wheel builders have a rig that allows them to check that the hub is centered relative to the rim and that the rim runs true, i.e. not wobbling from side-to-side when the wheel is spun.
Maintaining a Relationship Despite Change
One of the benefits of bicycle wheels is that they maintain their shape even when being ridden. And part of the reason for this is that the spokes (the tension elements) redistribute stress while the bike is being ridden.
While a bike is being sat on, the weight of the rider passes through the forks (let's focus on the front wheel) and to the hub. The hub and fork is prevented from sinking by the uppermost spokes which undergo an increase in tension. The lowermost spokes undergo a decrease in tension. The heavier the rider the greater the shift in tension.
While the bike is being ridden tension is continually redistributed. As each spoke becomes vertically uppermost (top-dead-center) it becomes the main tension bearing spoke while the lower most spoke has the least tension. The tension is constantly redistributed through the spokes as the wheel rolls.
Focusing on one single spoke as it goes around; at bottom-dead-center it has the least tension. As it turns upwards, it undergoes an increase in tension until it reaches top-dead-center. Then after it passes through top-dead-center it undergoes a reduction in tension till it reaches bottom-dead-center. Then the cycle repeats. And each spoke undergoes the same cycle of tension variation.
This demonstrates one of the hallmarks of a tensegrity. They are responsive. In the case of the wheel that means that the tension elements, the spokes, redistribute tension as the wheel experiences changes in the forces acting on it. While externally the wheel might not change in appearance, there is, should we choose to measure it, a change internally.
Controlled (or Responsive) Relationships
Let's say that we wanted to shift the hub relative to the rim. We'd have some limits. We don't want the rim to contact the hub (or vice versa) and we, of course, want to keep the rim connected to the hub. So what is possible within these constraints (ignoring, for the moment, how we might create these changes)?
We could cause the hub to turn relative to the rim. Looking at the wheel along the axis of the hub we could turn the hub clockwise or counterclockwise relative to the rim. (Or we could turn the rim relative to the hub.)
Looking at the wheel head on (at it's profile) we could cause the hub to move laterally relative left or right relative to the rim. From this same viewpoint we could also cause the hub to tilt. And we could allow the hub to flop around relative to the rim without it actually being able to come into contact with the rim.
To accomplish any of these changes we could simply vary the amount of tension in particular spokes.
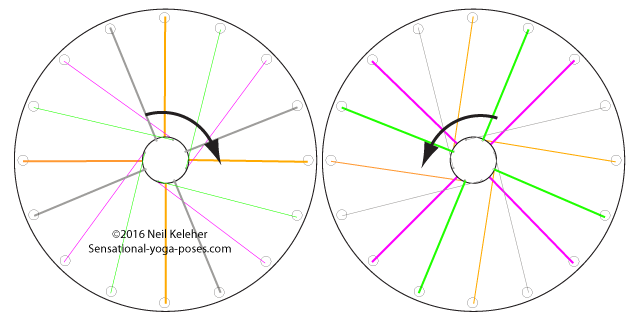
Rotating the hub relative to the rim.
In the first image the orange and gray spokes have more tension to twist the hub clockwise.
In the second image the purple and green spokes have added tension to twist the hub counterclockwise.
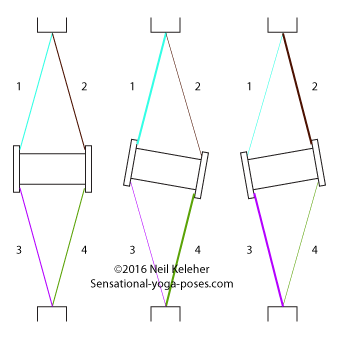
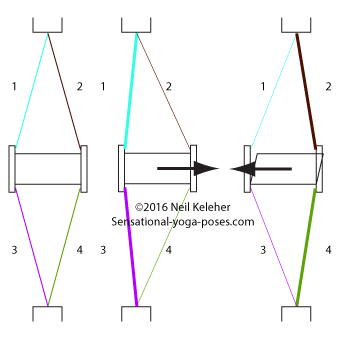
In the left most set of images spoke tension is varied to tilt the hub. In the right set of pictures spoke tension is varied to "slide" the hub relative to the rim.
Controlling Relationships
To help change the relationship between the hub and the rim we could use motors that are designed to add tension to the spokes while active.
To measure the position of the hub relative to the rim we could use the output of the motors as one indicator. (Which is the same as the feeling of activating or "flexing" a muscle.)
To help figure out where the hub is with respect to the rim, stretch sensors could give out an increasingly louder output the greater they are stretched. For each spoke there could be three of these stretch sensors arranged in series (connected end-to-end as if forming one long sensor). One would lay across the motor, one between the motor and the hub and one between the motor and the hub.
If stretched while the motor was inactive, then all three stretch sensors would register a change. If the motor was active, it could act against a greater force and thus allow the spoke to lengthen. It could act against an equal force in which case the spoke stays the same length. It could act against a lesser force in which case the spoke shortens.
If the motor is active and shortening its spoke, the the stretch sensor across the motor would remain relaxed. If the motor is active but its spoke is lengthening anyway then the stretch sensor across the motor would send out a signal. Whether shortening or lengthening or remaining at a constant length, the two stretch sensors not crossing the motor would be stretched and thus send out a stretch signal.
These three stretch sensors could correspond to connective tissue within or around the belly of a muscle itself, and also to the tendons (and ligaments) that connect the muscle to bone at either end.
Heavy Partners and Stress
While tensegrities are known for their high strength to weight ratios, the elements of the human body are anything but light. Bones are heavy in and of themselves and add to that the weight of muscles and organs. And so it helps to understand that the elements of the body are heavy.
To this end, imagine that the rim and hub of our model (and even the spokes) all have weight, significant weight.
Suspending the wheel horizontally by its hub then the weight of the rim being pulled downwards would create a pull on the spokes, causing the stretch sensors in those spokes to send out a signal.
If we suspend the wheel by the rim instead then the weight of the hub will cause those stretch receptor readings.
Depending on the relative weight of the rim and hub, the amount of stretch would vary. Note that in terms of real muscle, some muscle is so bulky that it is relatively easy to feel when it is active. Other muscles are so small or so thin that it is difficult to feel when they are active. And so their activity has to be inferred, generally by the stretch they induce in the stretch sensors of themselves or opposing muscles.
The Benefits of Tensegrity
When building a controllable bicycle wheel tensegrity I made a point that the motors, via their output, could be one way of helping to determine the current relationship (or change in relationship) between rim and hub. I also pointed out that stretch could be another way of sensing that relationship.
At one extreme of control we have a totally relaxed situation where the hub flops around relative to the rim.
From the relaxed state, if we add just enough tension to the spokes, we have a situation where minimal effort is used to maintain the relationship between hub and rim. While also meaning that less energy is expended, this mode is also important because it can be easier to feel, via changes in tension, any changes. The more we increase muscle action, the more difficult it is to feel tension changes.
At the other non-destructed end of the spectrum, we have the possibility of maximal tension so that the hub is fixed relatively firmly with respect to the rim. This results in a solid, structure. Such a structure doesn't offer much in the way of flexibility. It also costs in effort. And it may also cost in responsiveness. How fast can a structure with maximal tension throughout respond compared to the structure with just enough tension?
Dealing with a body with weight, any part of the structure closer to the ground has to bear more weight than any part of the structure further from the ground. So for example, standing on the feet, the feet and ankles bear more weight than the knees and the knees in turn bear more weight than the hips and so on.
Applying this to the operation of our own body the idea would be to vary muscle tension according to how close that part of the body is to the ground. To this end tension would be applied so that closer to the ground we have greater stability (but still some sensitivity) while further away from the ground we have greater sensitivity (but still some stability). At the point closest to the ground we might have greater tension requirements for greater stability with reduced tension the further away from the base that we get.
Published: 2016 04 22
Updated: 2020 10 28